
在一個雨下得比依萍找她爸要錢那天還大的后半夜,你孤身一人駕駛著先進的智能電動車,行駛在狹窄漆黑的二級縣道上,目的地是 200 公里外的老家。盡管表顯 220 公里的剩余續(xù)航看上去足夠撐到終點,但純電車天生的 " 虛弱體質(zhì) " 讓你一陣陣心慌。





短暫的心理斗爭后,你決定駛?cè)刖嚯x最近的服務(wù)區(qū),進行補能。
半小時后,你開進服務(wù)區(qū),展現(xiàn)在面前的,是泥濘不堪、沒有雨棚的充電車位,污垢包漿、四散在地的充電線纜,以及不下車靠近就根本無法確認是否正常工作的充電樁。
風(fēng)越刮越烈,雨越下越大,水洼越積越深,續(xù)航里程越停越少。這時的你,面臨兩個選擇:第一,下車拔槍充電,淋成落湯雞肯定沒跑,還能 " 附贈 " 一手一腿的黃泥;
第二,果斷開車走人," 賭 " 下一個服務(wù)區(qū)的充電條件,會比這里好。
進退維谷的你,心中升騰起一個想法:要是能有 " 人 ",幫我拔下這把槍,充上這個電,該多好啊。
事實上,早在 2018 年,中國智能電動車公司蔚來,就用真實的人,通過" 一鍵加電 "這種途徑,打通了 " 替您補能 " 的服務(wù)閉環(huán)。用戶只需在 APP 上下單,然后耐心等待服務(wù)專員到來即可。" 加電小哥 " 會嚴格遵照云端大數(shù)據(jù)計算出的最佳補能手段,或是開去充電,或是去換電站換電,或是開著奶爸車上門充電。
" 一鍵加電 " 體驗非常不錯,可痛點也很明顯:用戶要離開自己的愛車,去別處熬過這段補能時光。盡管蔚來反復(fù)強調(diào),會 " 確保在最短時間內(nèi)完成加電 ",但在前述暴雨 + 泥地場景下,用戶下車后去哪里,怎么去是個問題;而對用戶來說,花近 200 元人民幣專門呼叫一個人大老遠跑過來,只做一個 " 拔槍 " 動作,不僅浪費資源,也免不了被人指摘這樣的行為有些過于 " 小布爾喬 " 式的矯情。
那么,有沒有一種補能方式,可以一次性解決用戶 " 槍臟線重 "、" 必須離車 "、" 操作繁瑣 " 的使用痛點,并且顛覆當下 " 車要找樁 " 的充電底層邏輯呢?
有,而且辦法很簡單,換一個 " 人 " 就完事了。
這個 " 人 " 就是既沒有情緒波動,也不要一毛錢加班費的" 機器人 "。
還得是馬斯克
2015 年 2 月,44 歲的埃隆 · 馬斯克選擇打開自己的 " 潘多拉魔盒 ",釋放了可能是歷史上最具 " 行業(yè)破壞力 " 的一臺跑車—— Tesla Model S P85D 。其 3.3 秒的百公里加速能力不僅讓全世界人民在加速瞬間激動得漲紅了臉,也讓那些殿堂級的燃油超級跑車制造商羞紅了臉。更重要的是,Model S P85D 讓不少 " 燃油腦袋 " 的刻板認知碎了一地:原來,造一臺貼地飛行的 supercar ,并不像他們在紀錄片里說得那樣難。
不過,這只是馬斯克讓現(xiàn)代汽車工業(yè)從燃油進化到純電過程中的一小步。我們知道,彼時的純電車受限于電池性能,續(xù)航里程大多寒磣得不忍直視,百萬級 Model S P85D 字面上的 NEDC 續(xù)航也沒超過 500 公里。" 冒險家 " 馬斯克當然不愿原地坐等電池技術(shù)突破性進展帶來的續(xù)航提升,他開始從另外一條路上尋找答案。
這條路,就是充電。
在回復(fù)一位推特?zé)嵝木W(wǎng)友的提問時,老馬描繪了這樣一種未來出行場景:坐進特斯拉,說出要去的地方,車會自動行駛到該地點。隨后,你去上班、購物、打網(wǎng)球,車會評估當前電量狀況和后續(xù)出行需求,自動尋找最近的可用充電樁,開過去,停進專屬車位,充電蓋打開,充電線自動插進充電口開始補能。結(jié)束后,充電線自動拔出歸位,車輛自動駛離。
一句話總結(jié)就是:把車停穩(wěn),剩下的交給特斯拉。
這樣的出行體驗,別說 2015 年了,就算是現(xiàn)在聽到,也依舊覺得令人無限向往。想讓科幻電影中的場景落地,其實除了宏大的自動駕駛敘事外,一條外形 "The Terminator" 味兒爆表的多關(guān)節(jié)機械臂,才是能閉環(huán)整個過程的領(lǐng)銜主演。
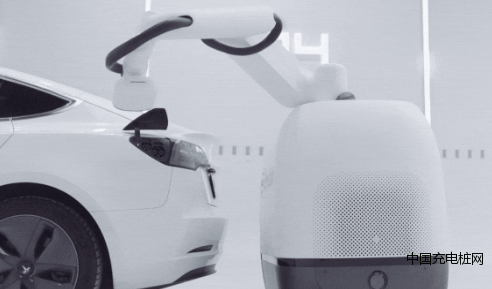
馬斯克給這條機械臂起了一個很賽博朋克的名字:Snakebot Autocharger Prototype,蛇形自動充電機器人原型機。
正如這張可能會引起部分人不適的動圖展示的那樣,固定在地面(理想狀況是墻面)上的蛇形充電機器人在監(jiān)測到車輛入位后,充電頭會主動尋找充電口進行對接充電。
全程無需一位真實的人類參與,既沒有一臉焦慮的車主,也沒有沒有笑容可掬的補能小哥,有的只是機器和機器之間靜謐無聲的連接通訊,傳輸能量,大愛無疆。
雖然這條蛇形自動充電機器臂全程只做了" 找、插、充 ",可這三個動作一點也不 " 簡單 ",其難度甚至高到特斯拉直到今天都無法將這條機械臂量產(chǎn)。
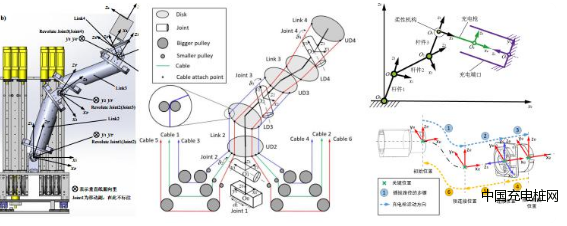
首先,這條蛇形自動充電機器臂有二十個關(guān)節(jié)。關(guān)節(jié)多的好處是自由度高,壞處是設(shè)計、制造、算法難度成倍增長。而常見的量產(chǎn)垂直串聯(lián)多關(guān)節(jié)機器人只有六個關(guān)節(jié),數(shù)量是特斯拉蛇形自動充電機器臂的三分之一。
其次,像特斯拉這樣把多節(jié)機械臂放在固定基座上的做法,對電機的要求過于 " 變態(tài) "。因為多節(jié)機械臂電機的承重隨電機數(shù)目和到末端的距離呈線性增長,基座上的第二個電機在承重的同時,還要控制體積,幾乎是不可能量產(chǎn)的臆想。如果投入使用后,充電次數(shù)多,需要頻繁調(diào)用機械臂,對制造材料的耐磨要求又會隨之提高。這就要電機必須同時滿足 " 重量輕、體積小、高耐磨 " 的魔鬼三角。
最后,讓充電槍對準充電口的全程,不亞于一次汽車的自動駕駛。用激光雷達確定待充電車與機器人本體的位置,用攝像頭確認充電口所在的位置,再用 3D 攝像頭捕獲三維位置數(shù)據(jù),與攝像頭獲取的二維視覺數(shù)據(jù)進行融合,確保" 一插即中,不偏不倚 "。
在反復(fù)權(quán)衡后,特斯拉雖然明面上沒有說自己放棄自動充電機器人,但在技術(shù)路線的選擇上,馬斯克的態(tài)度已經(jīng)非常明確。就在這個 6 月,特斯拉收購了成立于 2016 年的德國無線充電系統(tǒng)專業(yè)企業(yè) Wiferion ,該公司的核心業(yè)務(wù)是制造非接觸式感應(yīng)充電器,即大家熟知的 " 無線充電 "。
即便是對機器人有無限熱情的馬斯克,最終的選擇也是將自動充電機器人束之高閣,是不是意味著這條技術(shù)路線走不通?
一家美國公司,和一家中國車企,不這樣認為。
體面,太體面了
除了蛇形機械臂本身的制造難度外,自動充電機器人還有以下三個維度的考驗:
第一,如果提供的是公共充電服務(wù),那么不同車型的充電口位置不同,充電蓋開啟協(xié)議不同,充電需求也不同。這就要求機器人先得自動識別出這臺車,再對當前的電池狀態(tài)進行讀取,最后根據(jù)車輛 BMS 的設(shè)定,確定充電模式和速度,最終實現(xiàn)快速滿電。
根據(jù)電動汽車自動充電機器人產(chǎn)品和服務(wù)提供商享奕科技公布的數(shù)字,自動充電機器人充電口的定位精度應(yīng)達到 0.2mm ,就是說機器人相對車輛的空間位姿精度達到 0.2 mm,角度應(yīng)達到 0.1° 。從充電口定位到插拔完成時間小于 30 秒,插拔成功率高于 98% ,使用壽命高于 8 年,能在零下 30 ℃ 甚至更低的環(huán)境下正常工作。
第二,復(fù)雜環(huán)境下,充電口的精確識別與定位難度會大幅提升,比如在光線環(huán)境不佳的地庫、下著大雨的深夜,濃霧遍布的清晨等,都對自動充電機器人圖像識別與定位算法的穩(wěn)定性有極高要求;
第三,自動充電機器人在拔插充電槍時動作是否 " 溫柔 "。每臺純電車充電口的位置和角度不盡相同,如果控制算法不夠先進,拔插動作不夠絲滑,輕則會造成充電槍、充電口的非正常磨損,重則直接折斷充電槍,造成安全事故。
當然,辦法總比困難多。
固定在基座上的自動充電機器人對車輛停車的準確性要求很高,以此出發(fā),市面上出現(xiàn)了兩種解決方案。
第一種是來自美國充電技術(shù)公司 EV Safe Charge 推出的 ZiGGY 移動充電機器人,它的設(shè)計理念是少動槍,多動樁,即:The EV charger that comes to you.
本質(zhì)上, ZiGGY 是裝有四個輪子的超大號移動充電寶。用戶在手機上下單后, ZiGGY 會提前駛?cè)朐撏\噲觯㈩A(yù)先占據(jù)一個車位,識別車位編號后,將具體位置發(fā)還。用戶只需把車停到指定車位, ZiGGY 就會緊挨著你的車停好。接著,你從 ZiGGY 上取下充電槍,把它插到你的車上進行補能。
雖然最終的插槍操作,依然要真實的人類來完成,不怎么先進,但考慮到 ZiGGY 會搶車位,也算一功抵一過了。畢竟在一二線城市和節(jié)假日的高速服務(wù)區(qū),一個來即能停的車位遠比一把充電槍來得金貴。
考慮到充電盈利微薄,ZiGGY 還在車身兩側(cè)搭載了兩塊超大號液晶屏,除了顯示基礎(chǔ)的充電服務(wù)信息外,還可以接廣告恰飯養(yǎng)活自己。
利用類似 " 少動槍,多動樁 " 思路打造的,還有來自遠景動力的摩奇充電機器人(MOCHI)。相比 ZiGGY ,摩奇更先進的點在于全程 " 無接觸 ",手機下單,服務(wù)區(qū)域內(nèi)的充電機器人接單,開始找車,找到后自動拔槍充電,完成后自動拔槍開走。根據(jù)遠景動力公開的數(shù)據(jù),摩奇充電 2 小時,可以增加約 600 公里續(xù)航。
這種方案的邏輯底座是 " 樁位分離 ",非常適合一些無法增加固定式充電樁的老舊建筑(辦公室、商場或公寓大樓)。且完全不需要費錢、費力、耗時的基建、安裝和維護, ZiGGY 沒電了,會自己找地方 " 喂飽 " 自己,運營商要做的唯一維護,可能就是給那兩塊大屏幕擦擦指紋印。
第二種是汽車公司更傾向選擇的 " 樁位一體 "。
比如理想汽車最近公布的自動充電機器人,就是在自建充電站內(nèi),先用自主泊車 AVP (Automated Valet Parking)技術(shù),讓車遵照預(yù)先設(shè)定好的位置,精準停入車位,隨后充電機器人從樁內(nèi)伸出,充電槍前端進行一次 90 度彎折,對準車輛充電口,實施充電。完成后,自動拔出充電槍,自動結(jié)算。
從公布的 CG 動畫來看,理想汽車沒有選擇難度極高的蛇形機械臂,而是采用成本不低,但還是能量產(chǎn)的六自由度協(xié)作關(guān)節(jié)機械臂。這與路特斯在今年 5 月公布的全球第一款量產(chǎn) " 閃充機器人 " 充電樁在機械臂模塊上的選擇思路異曲同工。
路特斯方案的不同點在于,它有一個可橫向伸縮機械臂的底座,還在地面上配載了供充電系統(tǒng)移動的軌道,以此來適應(yīng)不同品牌車輛的充電口位置和停車狀態(tài)。
從用戶體驗上看,自動充電機器人無疑當下最體面的方式。相比加油,全程不用下車,有 " 人 " 幫你插;相比換電,省去特地開到固定場所的時間,在停車場就能靈活搞定;相比 " 一鍵加電 ",不用擔(dān)負 " 搖人過來只做件小事 " 的心理愧疚感。
不信你找找,還有比自動充電機器人對純電車用戶更友好的補能方案嗎?
寫在最后
體面歸體面,友好歸友好,靈活歸靈活,但自動充電機器人注定無法成為解決用戶充電焦慮的主流方案,最多是個補充。
它四處可去,但單機儲能上限低,比如大眾汽車推出的充電器人電池容量只有 25 度,充一臺 100 度電池容量的車,至少得換四個機器人;
它機動性強,但由此帶來的維護成本,比固定充電樁高。加上,機器人本身到處跑就得耗電,為它充電就要另外付錢,這些成本最終會轉(zhuǎn)嫁到用戶身上,導(dǎo)致單次補能成本高的令人難以接受。
如果說,充個電中途多換幾個機器人,電動車主還能勉強接受的話(畢竟節(jié)假日充電一排就是 2 小時起步),那呼喚一次機器人花錢更多,電動車主指定不愿意買單。
畢竟,買電車的人,可都是主打?qū)嵱弥髁x的價格敏感型用戶。




委員會(中國)")

客服")